Nosso Projeto
INTRODUÇÃO
A soltura ilegal de balões de ar quente, embora faça parte de tradições culturais, representa uma ameaça ampla e séria no contexto brasileiro. De acordo com dados do Centro de Investigação e Prevenção de Acidentes Aeronáuticos (CENIPA), cerca de 100 mil desses balões são lançados todos os anos. Diferentemente das aeronaves controladas, os balões não tripulados são feitos de materiais inflamáveis, como papel fino, e movidos a fogo, sem qualquer sistema de controle de direção ou de pouso. Essa falta de controle torna sua trajetória imprevisível e altamente perigosa para diversos setores.
No campo ambiental, os balões ilegais estão entre as principais causas de incêndios em áreas de preservação. Um estudo de 2002 revelou que 24% dos incêndios florestais no estado do Rio de Janeiro, entre 1991 e 2000, foram provocados por balões. Outro caso marcante ocorreu em 2021, quando um balão caiu no Parque Estadual do Juquery, na região metropolitana de São Paulo, causando um incêndio que destruiu 53% do último remanescente de Cerrado da área.
Além disso, os balões representam um risco significativo para a aviação, já que são invisíveis aos sistemas de radar e, portanto, difíceis de detectar. A proximidade desses objetos com rotas aéreas é uma preocupação constante nos aeroportos brasileiros. Entre janeiro e maio de 2024, foram registrados 186 avistamentos de balões no Aeroporto de Viracopos, resultando em um custo estimado superior a 5 milhões de reais. De forma semelhante, em fevereiro do mesmo ano, o Aeroporto de Guarulhos registrou 25 alertas de balões em apenas uma hora, colocando em risco a segurança de trabalhadores aeroportuários, passageiros e aeronaves.
Em áreas urbanas, as quedas de balões também têm causado incidentes graves, deixando mortos e feridos. Em 2024, por exemplo, um balão provocou um incêndio em São Paulo, nas proximidades de prédios e de uma creche, o que resultou em falta de energia para cerca de um milhão de pessoas e prejuízos financeiros expressivos.
Atualmente, os alertas sobre a presença de balões dependem de avistamentos feitos por moradores locais — um processo lento e ineficiente que, em alguns casos, leva dias para ocorrer, permitindo que o fogo se alastre demasiadamente. No caso do Juquery, por exemplo, o incêndio só foi avistado três dias depois, quando os danos já eram irreversíveis. Mesmo em aeroportos, onde as torres de comando são responsáveis por alertar os pilotos sobre a presença de balões, ainda não é possível determinar sua localização exata, tampouco prever sua movimentação.
OBJETIVO
O objetivo do projeto é desenvolver um protótipo confiável, reprodutível e de baixo custo para detectar balões em tempo real e prever suas trajetórias, com foco especial em áreas de maior vulnerabilidade, como unidades de conservação e aeroportos do Sudeste brasileiro.
METODLOGIA
1. Dataset & Rotulagem
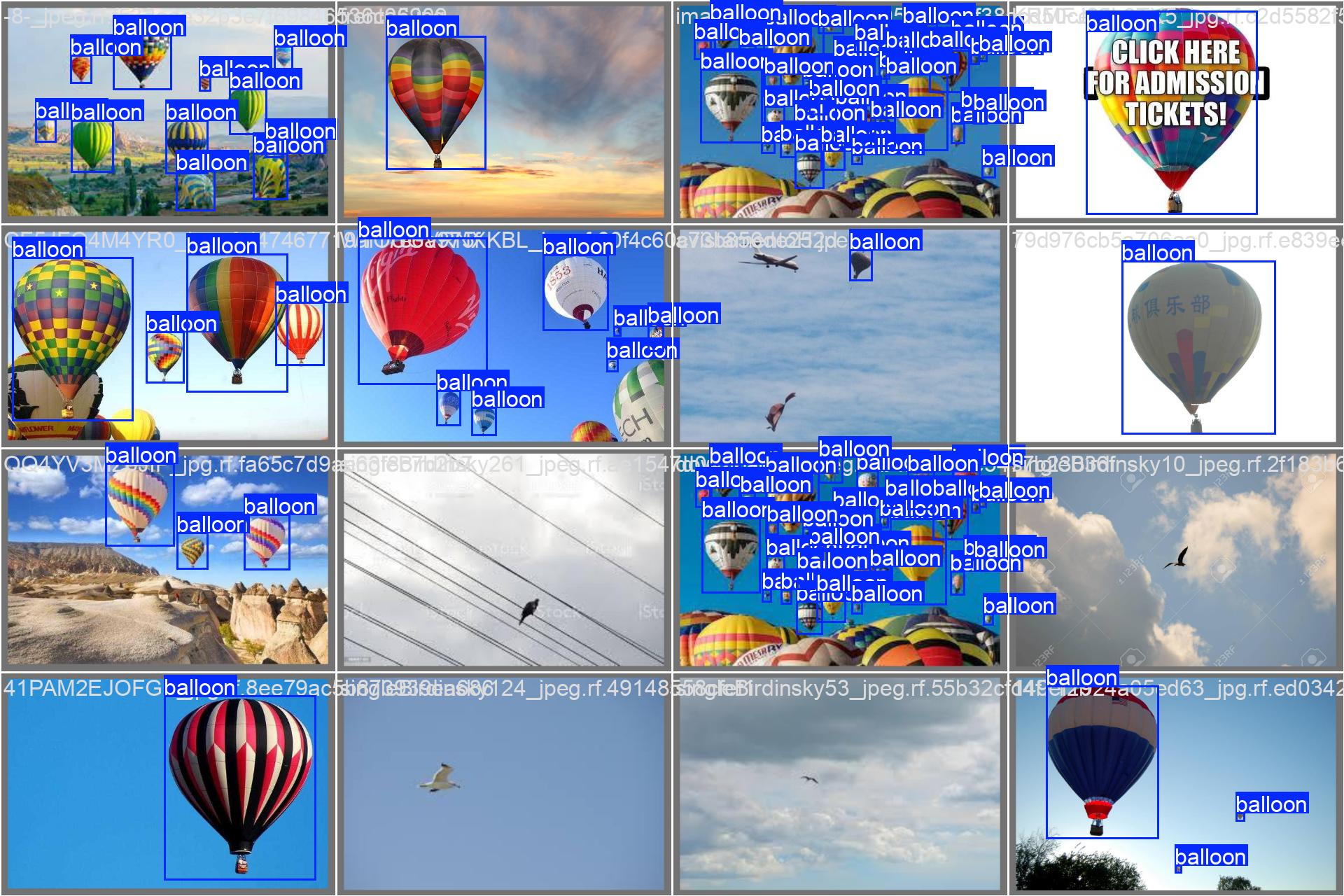
Para o desenvolvimento deste projeto, foram aplicadas técnicas de aprendizado de máquina com o objetivo de criar um sistema capaz de reconhecer balões em imagens e vídeos de forma automática. O conjunto de dados criado para o treinamento contou com 2.526 imagens, sendo 1.407 com balões em diferentes distâncias, cores e condições de iluminação; 458 imagens de pássaros e 334 de aviões, objetos comumente encontrados no céu. A inclusão desses outros objetos teve o objetivo de aumentar a precisão do sistema, reduzindo falsos positivos, além de ser útil em aeroportos, já que os pássaros estão entre os principais causadores de acidentes aeronáuticos no mundo.
Em seguida, todas as imagens foram anotadas com caixas delimitadoras (bounding boxes) ao redor dos balões. Para melhorar a capacidade de generalização do modelo, foram utilizadas técnicas de data augmentation, como rotações e variações de saturação, expandindo o conjunto de dados para um total de 6.073 imagens. Esse conjunto foi dividido em 80% para treino, 10% para validação e 10% para teste.


2. Modelo e Treinamento
O modelo utilizado foi o YOLOv10, escolhido por sua alta eficiência na detecção de objetos em tempo real. Como o YOLOv10 não foi originalmente treinado para identificar balões, reconhecendo apenas objetos comuns, como carros e pessoas, foi necessário realizar um treinamento específico para essa tarefa.
O modelo foi treinado por 300 épocas com early stopping de 30, ou seja, o treinamento é interrompido após 30 iterações sem melhoria para evitar overfitting, processo em que o modelo memoriza os ruídos do banco de dados e perde acurácia em testes reais.
Em paralelo, conduzimos experimentos com YOLOv8, também amplamente utilizado em visão computacional. No trecho “Resumo adicional” abaixo, apresentamos os resultados alcançados com essa variação (precisão de 85%, recall de 88% e mAP@0.5 de 90%), que documentamos para comparação histórica do desenvolvimento.
.png)
 (1).png)
3. Métricas (YOLOv10) e Rastreamento
O modelo obtido foi avaliado por métricas amplamente utilizadas em visão computacional. No conjunto de teste — contendo imagens inéditas para a IA — o modelo apresentou 94% de precisão, 92% de recall, 93% de F1-Score e 96% de mAP@0.5.
Após a detecção em imagens, o rastreamento foi implementado em vídeos, tanto de forma assíncrona (offline) quanto em tempo real, obtendo resultados promissores, com alta velocidade de processamento e baixa perda de rastreamento, mesmo em vídeos de baixa resolução.
4. Triangulação e Posição 3D
Para estimar a posição do balão, desenvolveu-se um método baseado em triangulação para calcular suas coordenadas em relação às câmeras. Posicionando duas câmeras em um ambiente e assumindo uma como centro do plano, é possível calcular as coordenadas (x, y, z) de um objeto utilizando trigonometria, desde que se conheçam a distância entre as câmeras e os ângulos horizontal e vertical registrados por cada uma delas.
Além disso, um vetor de velocidade pode ser determinado comparando-se a posição do balão em quadros consecutivos e o tempo decorrido entre eles. As equações foram implementadas em Python com a biblioteca NumPy para otimizar operações matemáticas, e os vetores puderam ser visualizados no vídeo usando OpenCV (CV2).

5. Protótipo Físico e Controle PID
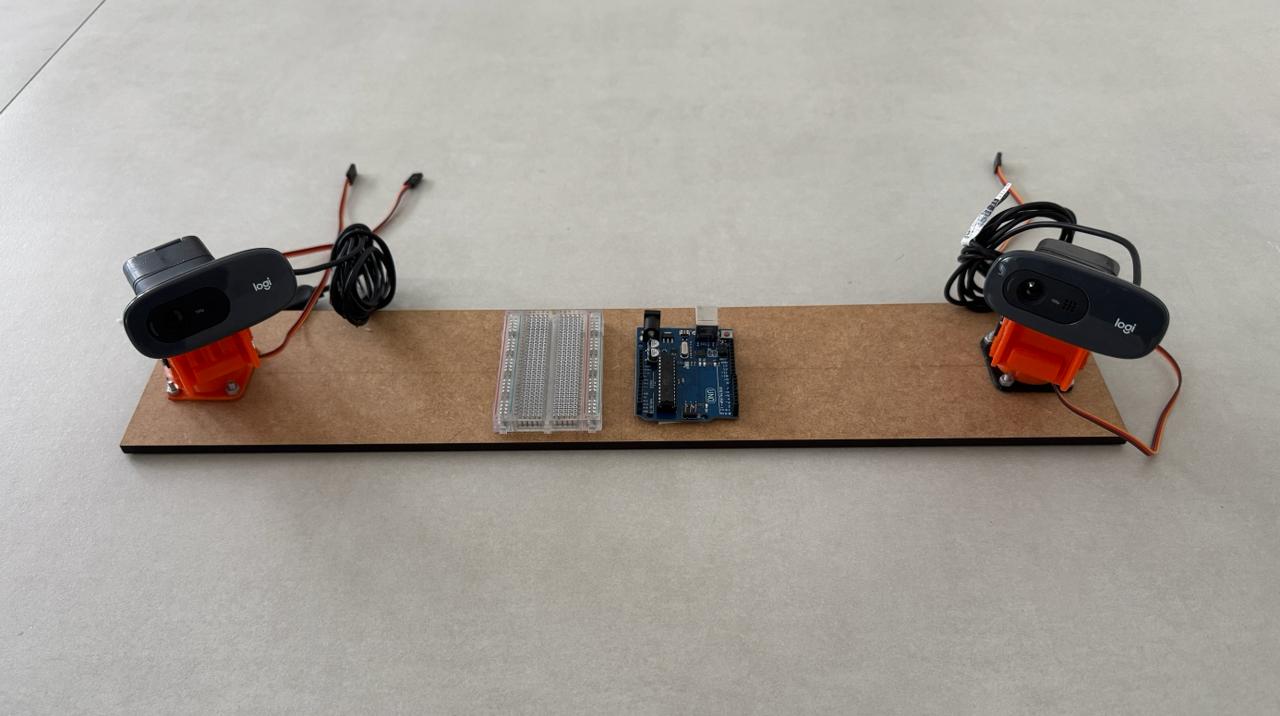
Para viabilizar os cálculos de triangulação, os ângulos das câmeras devem coincidir com o ângulo do objeto observado, ou seja, o balão precisa estar centralizado. Para isso, foi construído um protótipo com duas câmeras Logitech C270 acopladas a um sistema pan-tilt impresso em PLA, controlado por servomotores e gerenciado por um Arduino. Implementou-se um controlador PID (proporcional, integral e derivativo) para manter o balão centralizado, garantindo maior precisão nas medições. O programa Python recebe as detecções do YOLOv10, processa os dados, calcula os ajustes via PID e envia comandos aos servomotores, permitindo rastreamento automático.
.jpg)
6. Expoente de Lyapunov e Alertas Automáticos
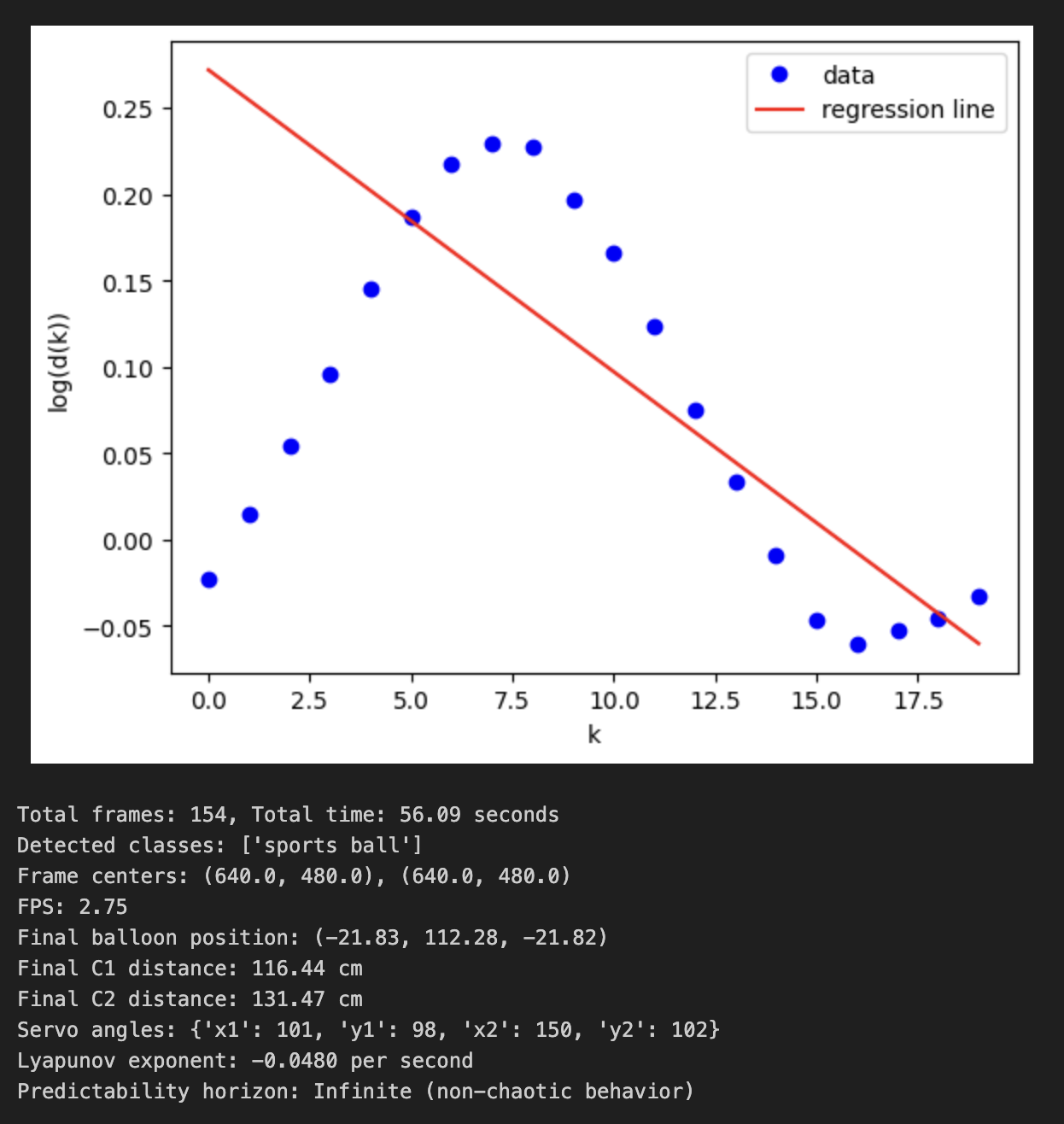
Adicionalmente, foi implementado o cálculo do expoente de Lyapunov, uma medida de sistemas complexos usada para avaliar a caoticidade. No projeto, o expoente foi empregado para estimar o horizonte de previsibilidade, ou seja, até quando é possível prever a posição de um balão antes que o sistema se torne caótico.
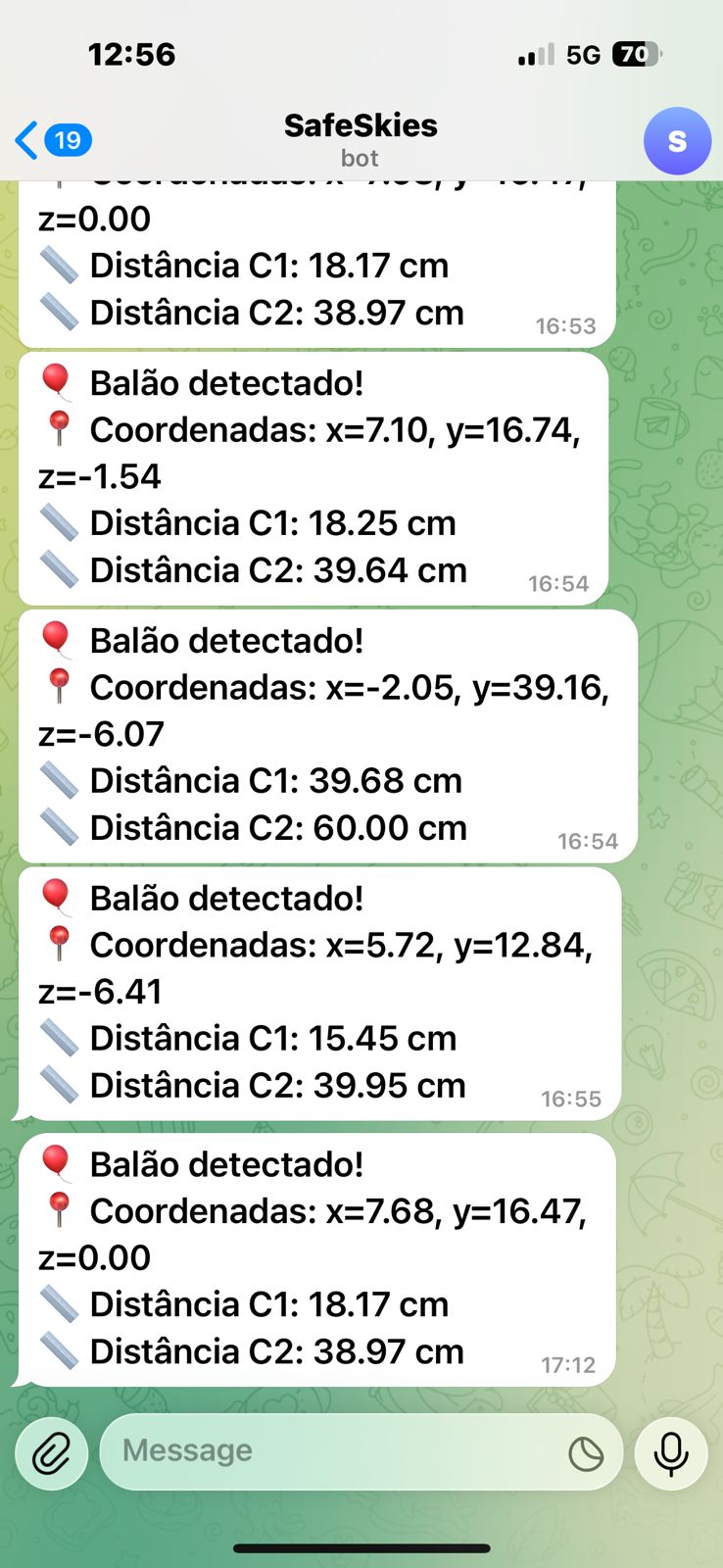
Para comunicar às autoridades locais, o sistema envia automaticamente uma mensagem com as coordenadas do balão e sua distância em relação às câmeras para um grupo no Telegram sempre que um balão é detectado, permitindo que as autoridades validem o reconhecimento e acionem procedimentos de intervenção.
Futuros Desenvolvimentos
Por fim, dado o sucesso nos cálculos e no rastreamento em testes controlados, bem como os bons resultados na detecção em vídeo, essa etapa da metodologia foi considerada concluída. No futuro, pretende-se adaptar o protótipo para ambientes externos, de modo que dois Raspberry Pis executem o código Python e se comuniquem com um terceiro computador — seja outro microcontrolador ou um servidor na nuvem — que calcule o posicionamento e a trajetória do balão. Além disso, serão incorporadas bases meteorológicas, especialmente vento, utilizando campos vetoriais, para aprimorar a acurácia das previsões.
Dessa forma, as câmeras poderão ser instaladas em áreas muito afetadas por balões, como unidades de conservação (por exemplo, o Parque Estadual do Jaraguá, com o qual já estamos em contato) ou aeroportos, onde as detecções serão comparadas com avistamentos locais para verificar a precisão na previsão do ponto de queda. Assim, será possível estimar a trajetória do balão, determinar seus potenciais locais de origem e queda e mitigar danos potenciais, salvando vidas e reduzindo perdas econômicas e ambientais.
Relatório Completo
Versão integral com metodologia, tabelas, resultados e referências.